- [email protected]
- Tuzla / İstanbul
Mühendisler Arılar Gibi Davranan Robot Arılar Programlıyor
15
Ara
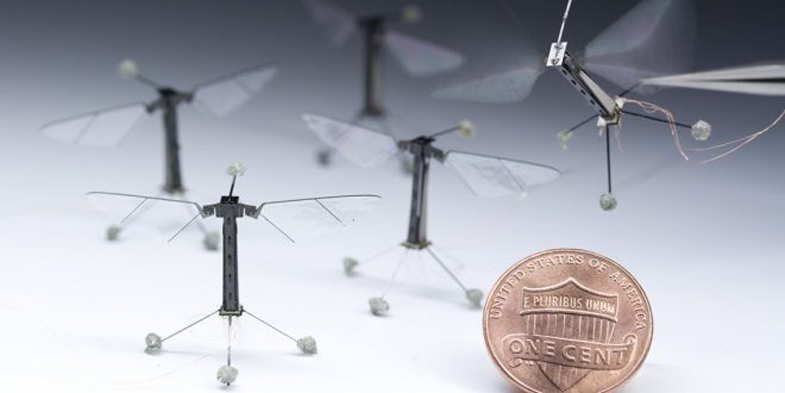
Mühendisler Arılar Gibi Davranan Robot Arılar Programlıyor Mühendisler aynı böcekler gibi hareket eden, sarı benzeri uçan robot böcekleri programlamayı başardı. Cornell Üniversitesi mühendislerinden oluşan grup, böcek beyninin nasıl çalıştığını taklit eden yeni nesil programlar üzerinde çalışıyor. Normalde bir robot arının kanatları çırpmak, rüzgarı hesaplamak, uçuşu ayarlamak ve bir çiceğe iniş yapabilecek rotayı hesaplaması için, masaüstü bilgisayar kadar bir bilgisayar taşıması gerekiyor. Intelligent Systems and Controls Laboratuvarı’ndan makine ve havacılık mühendisi Prof. Silvia Ferrari, bunu nöromorfik bilgisayar çipleriyle çözebileceğini düşünüyor. Normal bilgisayar çipleri 1-0 ikili sisteminde çalışırken, nöromorfik çipler elektrik akımının ateşlenmesiyle çalışan kompleks kombinasyonlarla, aynı beyindeki nöronların ateşlenmesi gibi çalışıyor. Nöron Gibi Çalışan Çip Ferrari’nin laboratuarı yeni nesil “olay bazlı” hissetme ve kontrol algoritmalarıyla nöral aktiviteyi taklit edebilecek şekilde geliştirmeler yapıyor. Bu sistemler nöromorfik çiplere eklenecek. Çünkü bu çipler, normal çiplere göre çok daha az enerji tüketiyor, böylece aynı boyutta daha fazla yükleme yapılabilecek. Harvard Mikrorobotik laboratuarı’nın geliştirdiği 80 mikrogramlık RoboBee(robot arı) ile birlikte çalışıyorlar. Robotta optik akış,görme ve hareket sensörleri var. Robot arı kabloya bağlı olsa da, araştırmacılar yeni güç kaynakları ile bunun üstesinden gelmeye çalışıyor. Cornell ‘in algoritmasıyla ağırlık çok artmadan, daha otonom ve kompleks çevrelerde robot çalışabilecek. “Hafif bir yel veya kapı çarpması küçük robotların kontrolünü kaybetmesine neden olabiliyor. İşte bu nedenle RoboBee için çarpmalardan kaçabilecek sensörler ve algoritmalara geliştirerek, halen uçmasını sağlamaya çalışıyoruz. Önceki modellemelere dayanan bir robot yapamazdık, bu nedenle her durumu öğrenerek adapte olabilecek bir sistem geliştirmek istiyoruz,” diyor Prof. Ferrari. Taylor Clawson tarafından koşullara göre hız ayarlayabilen bir sanal simülatör geliştirildi. Fizik tabanlı simülatör RoboBee’nin her kanat çırpmasındaki maruz kaldığı aerodinamik kuvvetleri simüle ediyor. Sonuç olara RoboBee kompleks uçuşlardaki hareketi tam olarak tahmin edebiliyor. Tasarlanan otonom uçuş kontrolü aynı sinir ağı gibi çalışıyor. Bu ağ robotun üretimi esnasında olabilecek düzensizlikleri tanımlayarak, bunu gerçek zamanlı olarak öğrenebiliyor. Prof. Ferrari , büyük otonom ve esnekliğe ilave olarak mikro kameralar ve dokunsal geri alımlı bir anten ve ufak tüyle gibi kontakt sensörleri ilave etmeyi planlıyor. Harvard’ın bu gezici robotu 17 mm uzunluğunda ve 3 g’dan az ağırlığa sahip. Saniye 44 mt hıza sahip olan robotu Ferrari’nin laboratuarı yeni algoritmayla geliştirerek çeviklik sağlanmaya çalışıyor. Ferrari’nin çalışması 4 yıllık Deniz Kuvvetleri Araştırma Ofisi’nden 1 milyon dolar fon ile devam ediyor.